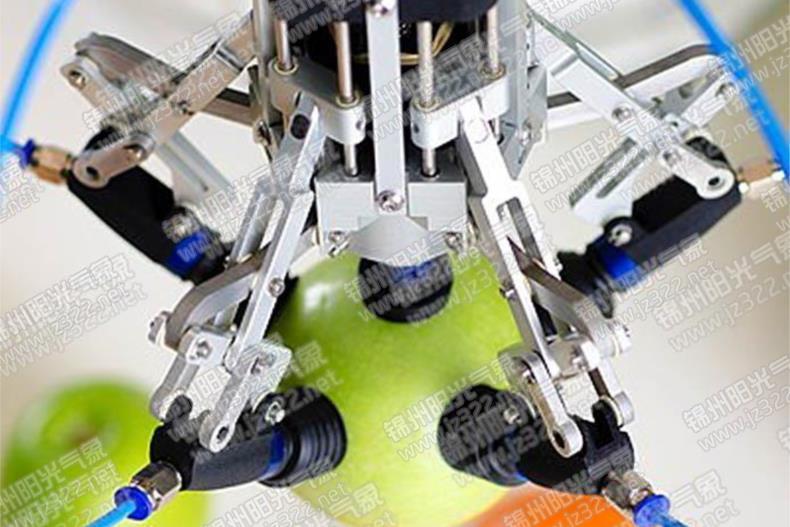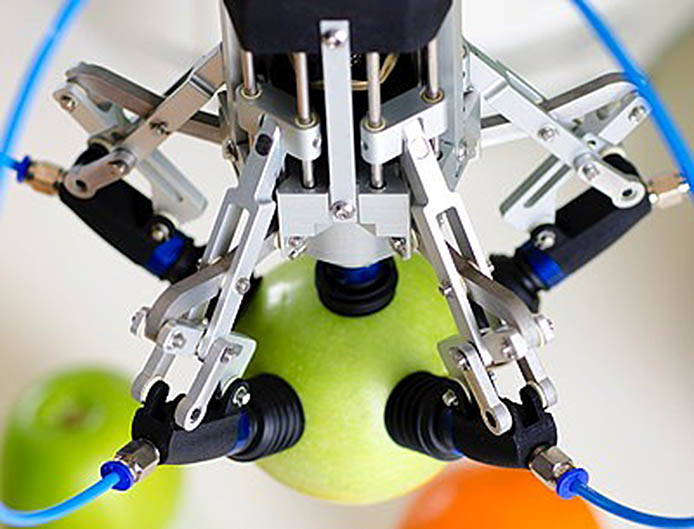
利用机器人夹具和视觉系统,能够区分并选择性地挑选不同品种、形状、大小和颜色的水果。可从事复杂的拾取和涉及不规则组织项目任务, 如分拣水果和蔬菜。
虽然机器人通常是在在一个可控的环境中重复做着同样的事情,如果任务或环境发生变化,他们就会方寸大乱。
例如,要在仓库中拾取水果和蔬菜,机器人必须要和人一起共事,并要处理不规则事项。应不断变化的环境。需要执行许多不同的任务,从识别对象,计算拾取顺序,计划抓取、放置的先后顺序。
将高性能图像处理算法与低成本传感器和商用硬件结合,一旦任务未进行严格定义,可实现对机器人进行软控制。此机器人系统还可对没有CAD(计算机辅助设计)模型存在的对象进行处理。
通过将水果随意堆砌在碗中对此技术进行测验,机器人通过其机器视觉系统和一些智能软件,以确定哪些水果片放在上面。可准确定位要拾取哪一个水果,并同时不会碰到旁边对象。
机器人手刚好适合水果的形状并牢固夹住水果而不造成损坏,并且可对水果进行颜色分类。